无人驾驶
不用多说,自从深度学习开始席卷机器学习领域,计算机视觉相关技术突飞猛进。从阿尔法狗到Dota比赛,人类节节败退,强化学习也逐渐的开始进入人们的视野。无人驾驶技术从当年的实验室阶段真的开始走入了工业界(更像是从工业界反传到了学术界)。还等什么,这么激动人心的高新科技,我们怎么能不赶紧上车呢?
没有车怎么办?难道我们真去买一辆装了8个雷达的传感器车?我们不是大厂,自然是艰苦奋斗,自力更生———自己做一辆喽。
硬件准备
我们可能需要大马力的车模来承载较多的传感器,计算设备,控制系统… 所以在淘宝买一个大马力的坦克车模吧:
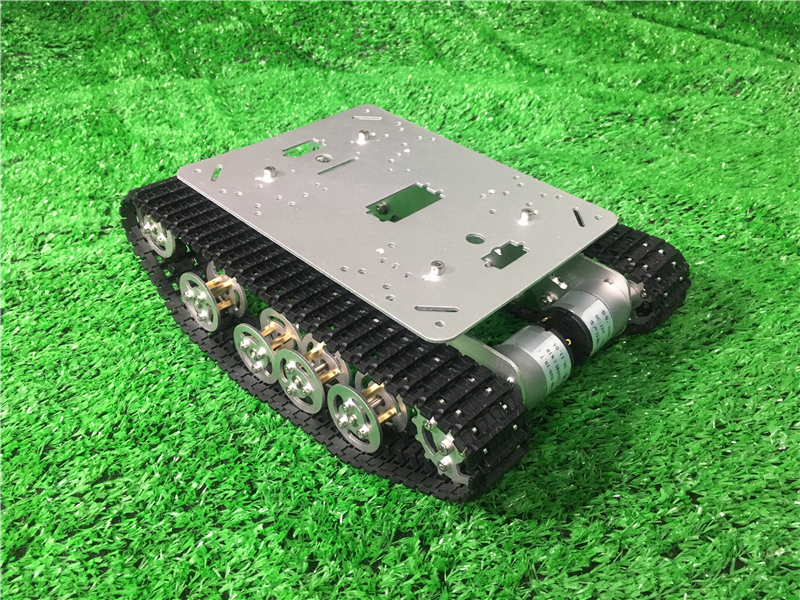
大马力坦克>
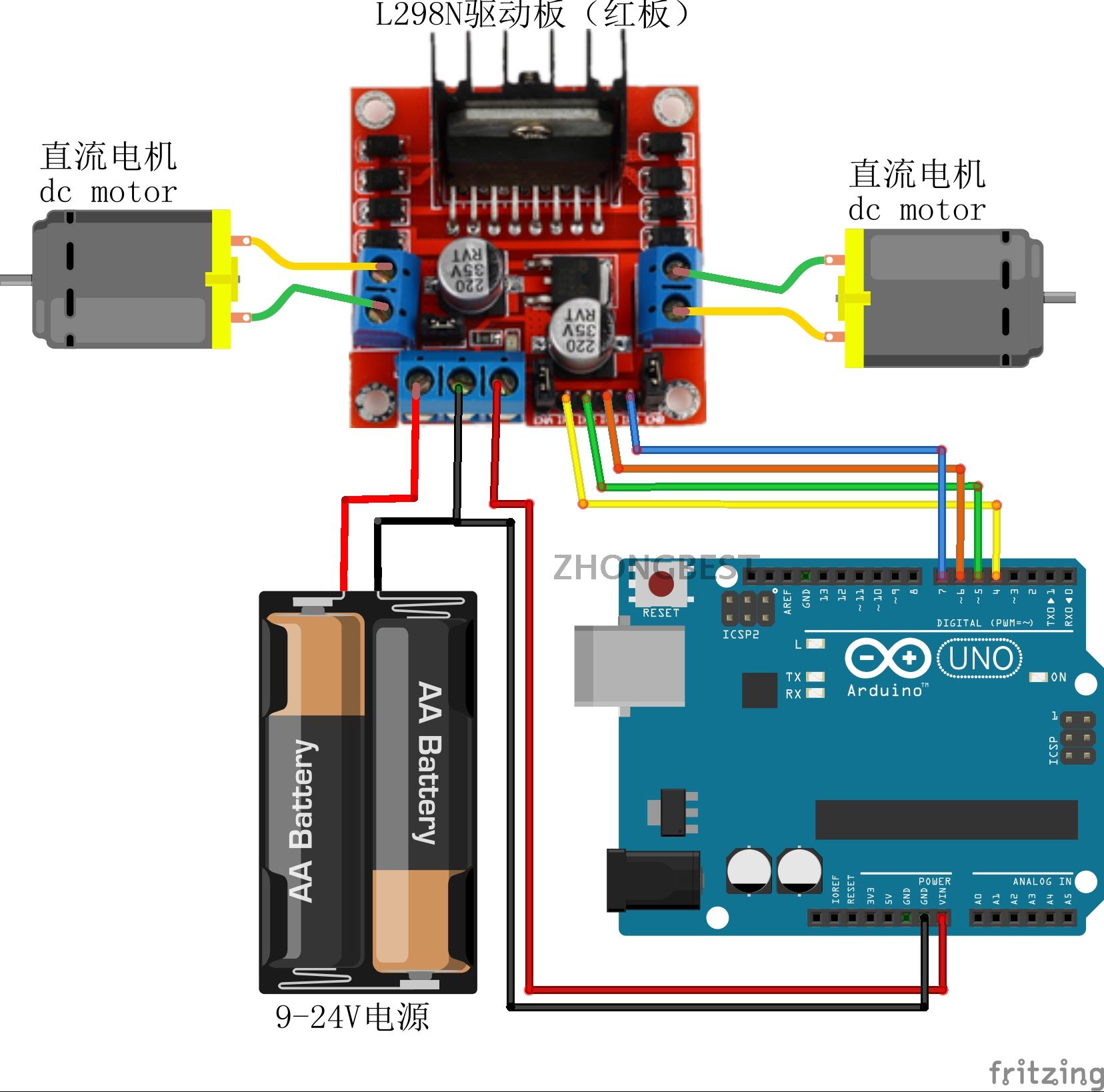
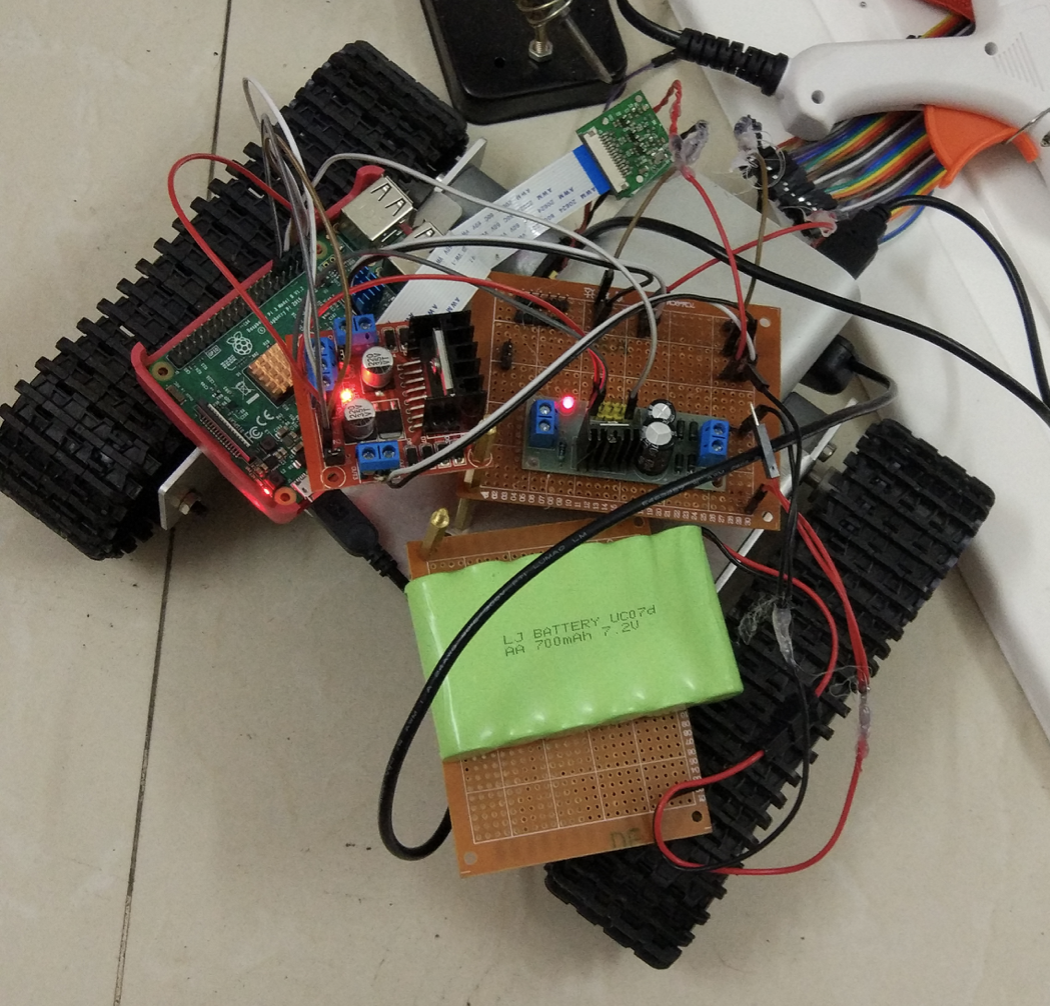
基本的像电机驱动可以买现成的模块,比如L298。还有一些稳压电源之类杂七杂八的也必不可少。MCU的选择上,我倾向于树莓派,毕竟买了之后可以通过局域网无缝对接服务器,控制起来更加方便。要是用C51或arduino之类的,你还要去买局域网控制器或者无线设备等,太麻烦了。我使用树莓派搭建了一个flask服务器,和计算机相连,这样只需要树莓派来转发视频流就可以了。
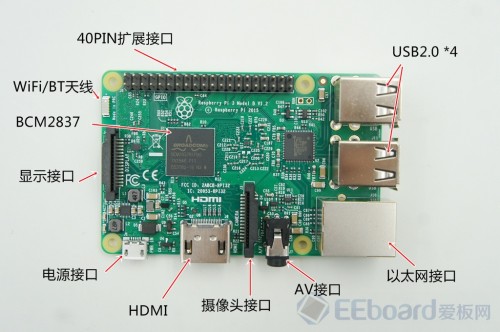
树莓派3自带Wi-Fi模块
电路图也很简单,网上一大堆的相关电路:
运动视频
我们看一眼做成后的坦克:
用flask转发树莓派捕获的视频:
(如果播放失败,请转至 https://v.qq.com/x/page/j05662y6ylj.html 查看)
程序
(未完待续)